Thin lenses: Shift and tilt phenomena
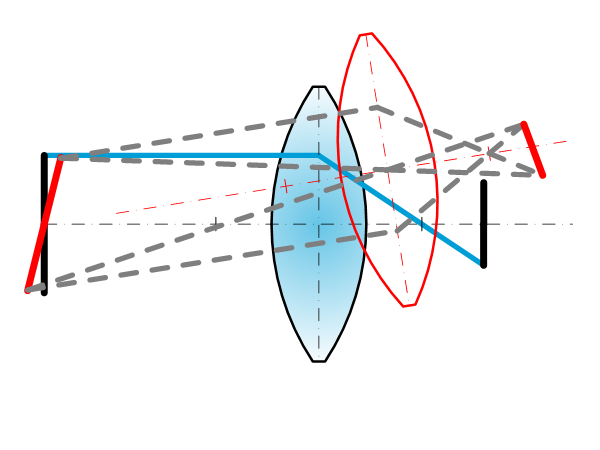
Introduction Mounting thin lenses to their mechanical interfaces comprises imperfections to the initially designed optical paths due to manufacturing and assembly tolerances. Quantification This sheet provides qualitative information about the phenomena because derivation of the shifts and tilts of the image as a result of the lens and/or object movement is extensive and non-transparent. Initial […]
Lenses: Overview
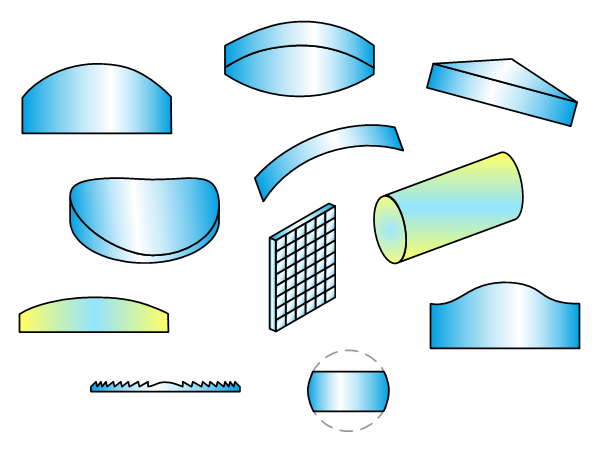
Introduction This sheet offers a short overview of the most used lens types, their properties, and typical applications. The main properties, cost and typical outer dimensions of the different lenses give a direct indication whether a lens type can be useful or not. Lens dimensions The basic dimensions are the Effective Focal Length (EFL), the […]
Fit sphere through points
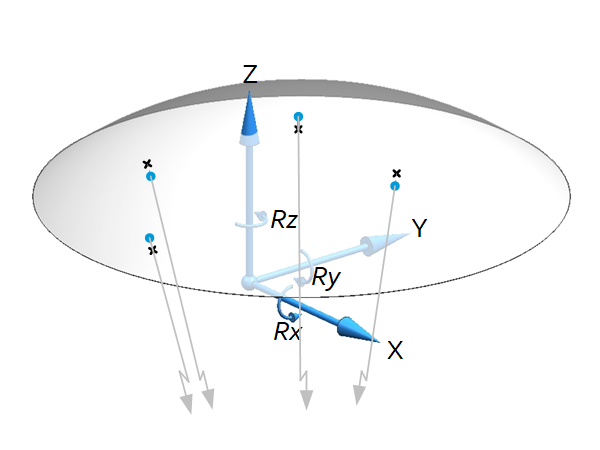
Introduction Method to derive a best fit of a sphere through a number (≥ 4) of XYZ data points, where the summed square errors of the data points in relation to the fit-sphere are in the direction perpendicular to the surface. Equation of a sphere $zleft(x,yright)=sqrt{left(R^2-left(x-x_cright)^2-left(y-y_cright)^2right)}+z_c$$left(x_c, y_c,z_cright)$ is the location of the center of the […]
Fit plane through points
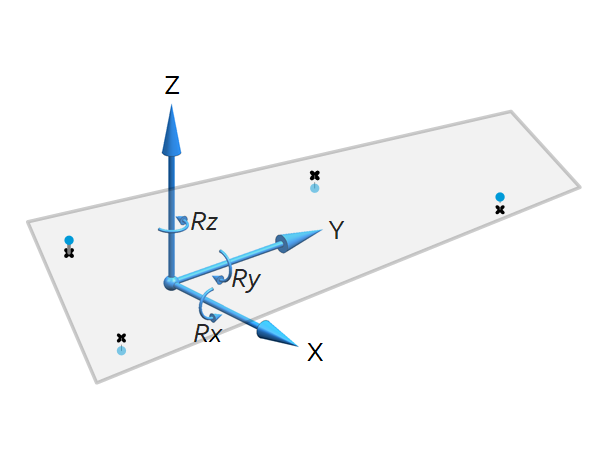
Introduction Method to derive a best fit a plane through number (≥ 3) XYZ data points, where the summed square errors of the data points in relation to the fit-plane in Z-direction is minimal. Equation of a plane $zleft(x,yright)=Acdot x+Bcdot y+C$ Data points $left[begin{matrix}x_1&y_1&z_1\x_2&y_2&z_2\x_3&y_3&z_3\&vdots&\x_n&y_n&z_n\end{matrix}right]$ Coefficients of plane equation $left[begin{matrix}A\B\C\end{matrix}right]=left[begin{matrix}sum_{i=1}^{n}x_i^2&sum_{i=1}^{n}{x_iy_i}&sum_{i=1}^{n}x_i\sum_{i=1}^{n}{x_iy_i}&sum_{i=1}^{n}y_i^2&sum_{i=1}^{n}y_i\sum_{i=1}^{n}x_i&sum_{i=1}^{n}y_i&sum_{i=1}^{n}1\end{matrix}right]^{-1}cdotleft[begin{matrix}sum_{i=1}^{n}{x_iz_i}\sum_{i=1}^{n}{y_iz_i}\sum_{i=1}^{n}z_i\end{matrix}right]$ Tip / Tilt angles $Rx=arctan{left[frac{d}{dy}zleft(x,yright)right]}=arctan{left[Bright]}$ $Ry=arctan{left[-frac{d}{dx}zleft(x,yright)right]}=arctan{left[-Aright]}$ […]
Heat transfer in mechanical systems
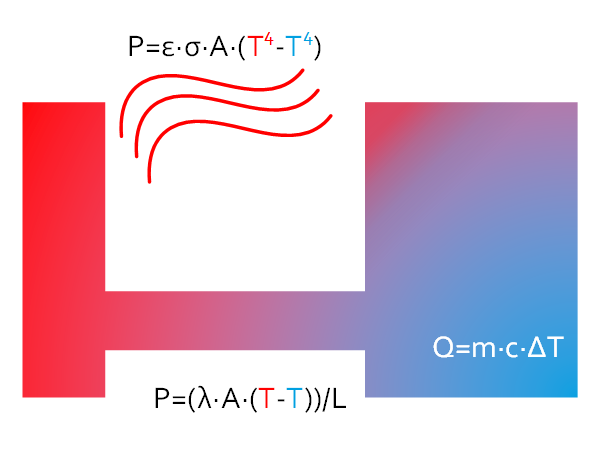
Introduction Hotspots in the construction such as actuators which dissipate heat affect e.g. the dimensional stability of the construction. In special environments such as vacuum and cryo, special care for heat abduction is needed. This sheet provides some insight in relation to this subject. Conduction (diffusion) Heat transfer through molecular agitation within a material and […]
Impact force
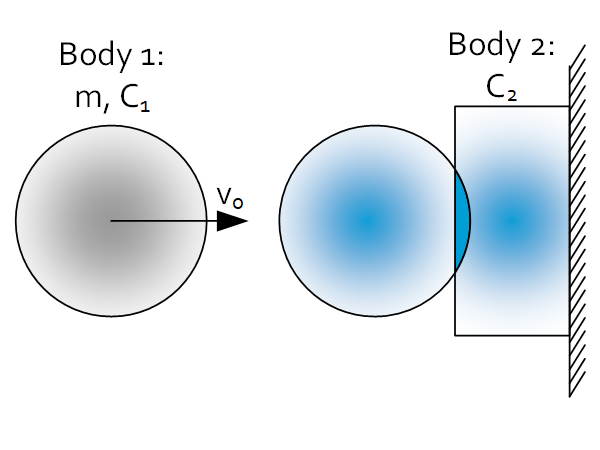
Introduction Bodies collide e.g. when play is present in the design. This collision causes elastic or plastic deformations to the colliding bodies. Collision Stiffness If both are ‘rigid’ take the local Hertzian stiffness.$c=frac{C_1C_2}{C_1+C_2}$ Max. Collision Force $F=v_0sqrt{mc}$ Max. Approach $u=v_0sqrt{frac{m}{c}}$ Deceleration Time $t=frac{pi}{2}sqrt{frac{m}{c}} $ Deceleration to $v=0$ ${a_{max}=-v}_0sqrt{frac{c}{m}}$$a_{ave}=-frac{v_0}{t}=-frac{2}{pi}v_0sqrt{frac{c}{m}}$ Collision of bodies Differential Equation:$mddot{x}+cx=0$$xleft(tright)=k_1cos{left(sqrt{frac{c}{m}}tright)}+k_2sin{left(sqrt{frac{c}{m}}tright)}$ Coefficients:$xleft(0right)=k_1=0$$vleft(0right)=k_2sqrt{frac{c}{m}}=v_0$ with […]
Hertz contact: Universal point
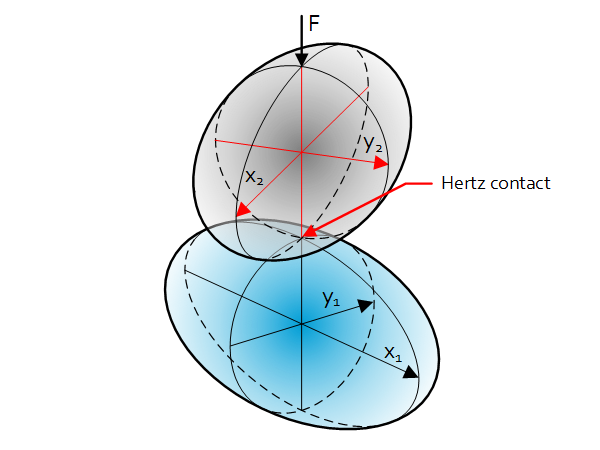
Introduction Universal calculation of Hertz point contact between two arbitrarily curved bodies in the shape of two ellipsoids under load $F$ and each body has radii around the x and y axis of which the smallest radius is called $r_x$ and the largest is called $r_y$. For a convex shape the radii are positive, for […]
Positioning terminology
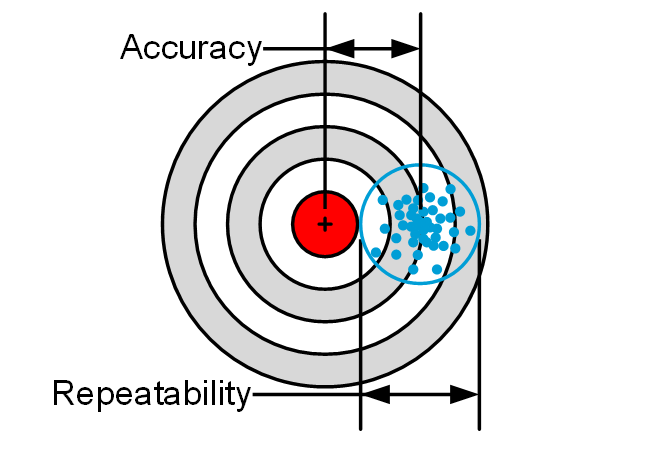
Introduction Accuracy, repeatability, resolution and stability are terms that are often confused. This sheet provides definitions of these terms.
Mass moment of inertia
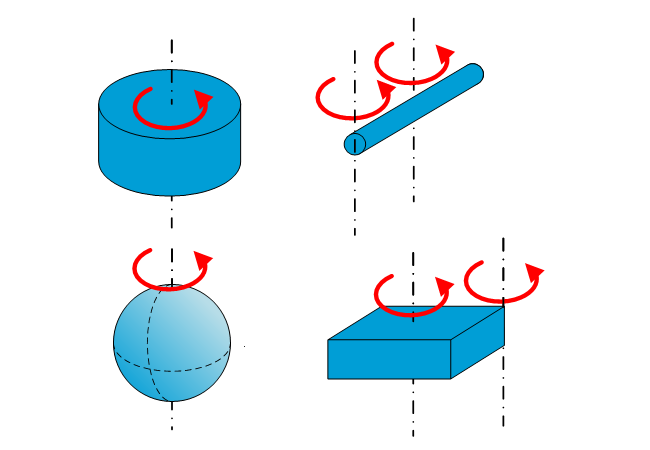
Introduction The mass moment of inertia measures the extent to which an object resists rotational acceleration about a particular axis, and is the rotational analogue to mass. The torque needed to achieve an angular acceleration is defined by: $$T=Idot{omega}$$ The mass moment of inertia for several shapes is shown in the table below.
Area moment of inertia

Introduction The area moment of inertia (also referred to as second moment of area) is a geometrical property of a shape describing the distribution of points around an axis. In classical mechanics it is used as a measure of a body’s resistance against bending. Note that next to the area moment of inertia, the polar […]