Introduction
Evaluating sensor specifications can be confusing. Part of this is due to the ambiguous parameter definition which varies between mechanical and electrical engineers and from manufacturer to manufacturer. Below the unambiguous JPE-definitions.
Displacement versus Position
A position sensor measures with respect to a defined zero and it does not require a homing procedure. A displacement sensor measures with respect to an arbitrary starting point and must be homed to convert the displacement into a position.
Contactless
A sensor is contactless if it does not require a mechanical connection or contact (sliding, rolling) with the target to measure the position/displacement. A sensor can be contactless even if an electrical connection between the target and ground or the sensors electronics is required (capacitive sensors).
Vacuum compatibility / Cryo compatibility
A sensor is compatible if it can be continuously operated within specification in such environments. For vacuum compatibility all the parts of the sensors which are inside the vacuum chamber (e.g. head, cable, connector) must meet the outgassing requirement of the specified vacuum level, e.g. (Ultra) High Vacuum.
Range & Stand-off
Sensor range (span) [m] = | maximal sensor value [m] – minimal sensor value [m] |. Stand-off is the distance between the sensor (head) and the minimal detectable value [m].
Resolution
Smallest detectable/discernible displacement (position) increment [m]. NOTE: Typically the resolution is equal to the noise level (noise limited), but manufacturers often quote the resolution of an internal digitizer which is too optimistic! NOTE2: Resolution might vary over the range and this is not always clearly specified in the datasheet. NOTE3: higher/better resolution = smaller increments, lower/worse resolution = larger increments.
Accuracy
Maximal deviation of the measured displacement with respect to the definition of the meter [m]. NOTE: manufacturers often specify accuracy as percentage of the range. Sometimes short range and long range accuracy are separated.
Absolute accuracy: Maximal deviation of the measured position with respect to the definition of the meter [m]. NOTE: A sensor with ill-defined stand-off can still be accurate despite its poor absolute accuracy.
Gain
Conversion gain from displacement to sensor output (e.g. [V/m], [counts/m]). The gain can be a constant or dependent on position. The inverse gain is used to calculate the measured displacement from the sensor signal.
Reproducibility
Ideally a sensor always gives the same output when it is at the same position. If this is not the case, the reproducibility is equal to the maximal deviation from the mean value [m]. NOTE: manufacturers often specify reproducibility as percentage of the range. NOTE2: reproducibility can in practice be difficult to discern from stability.
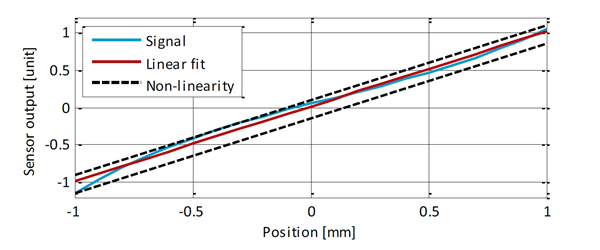
(Non-)Linearity
Maximum deviation of the sensor value from a first order polynomial fit expressed as a percentage of the total range, see figure below.
Hysteresis
The output of a sensor with hysteresis not only depends on the present position, but also on the past position (or environment). For instance backlash causes a difference in sensor output if the position if approached from one side or the other. Hysteresis is not separately quantified as it is difficult to discern form reproducibility.
Stability
Deviation of the sensor output while the position is invariant over a long term (> 10 seconds). For instance, temperature changes can cause variation of sensor position due to thermal expansion and sensor gain (electronics).
Bandwidth
The frequency range where the sensor gain is within ± 3 dB of the nominal gain specified as minimal frequency $f_{bw\ min}$ [Hz] and a maximal frequency $f_{bw\ max}$ [Hz]. For most displacement and position sensors the bandwidth starts at DC and only $f_{bw\ max}$ is specified.
Latency
Time between the actual measurement and when the matching value is present at the output [s]. Latency can cause measurement errors if the target is moving at high velocity and destabilize a feedback controller (phase lag).
Maximal target velocity
For some sensors, e.g. incremental encoders, target velocity is limited by the maximal output rate. The accuracy/reproducibility can only be guaranteed if the target always moves slower than the maximal velocity.
Noise level
The noise level is defined as three times the standard deviation (3σ) of the sensor signal ‘at rest’. NOTE: manufacturers sometimes specify root-mean-square (rms) or peak-peak noise.
Quasi-static noise: frequency range $f_{bw\ min}$ to ~100 Hz
Dynamic noise: noise in the frequency range $f_{bw\ min}$ to $f_{bw\ max}$.
Off-axis sensitivity
The sensitivity of the sensor to off-axis/parasitic displacements [m/m].
Cross-talk
Cross-talk can occur between different channels in a multi-sensor setup or originate from interference by an external source such as an actuator. Cross-talk depends strongly in application specific parameters, e.g. distance between sensors or sensor and actuator, cable routing, and thus cannot be quantified by one generic value.