Introduction
Hexapod or so-called Stewart platform mechanisms are widely used in precision engineering applications. The big advantage of this mechanism is the parallel linkage of all Degrees Of Freedom (DOF) from the moving platform to the base. In most cases this enables a much stiffer and compact design compared to a conventional mechanism where the independent DOF’s are stacked in a sequential way.
As an extension of the Precision Point sheet Hexapod: Kinematics this sheet focuses on the forces in the system.
Definitions
The following figure displays the relevant geometry.
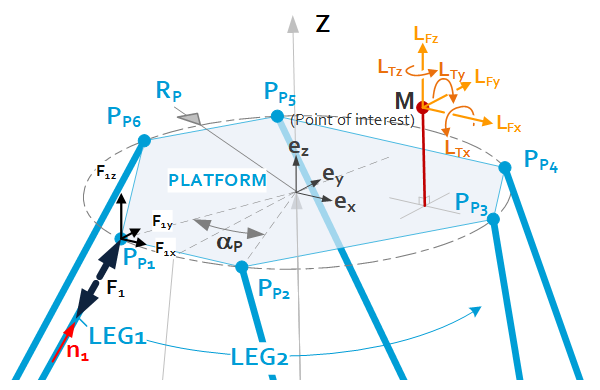
$P_B,\ P_P$
= Hinge locations in the base and platform
$R_B,\ R_P$
= Radius of pitch circle of the hinge locations base and platform
$\alpha_{B,\ }\alpha_P$
= Angle between the hinge locations of a leg-pair
$Z_P$
= Z-height of the platform in relation to the base
$M$
= Point of interest of the platform
${\vec{e}}_\#$
= Orthogonal unit vectors, standard basis
${\vec{n}}_\#$
= Unit vector collinear with leg number #
${\vec{F}}_\#$
= Force in leg number #, also extracted in x,y,z
$L_{Fx,Fy,Fz}$
= External force load in point M
$L_{Tx,Ty,Tz}$
= External torque load in point M
Force components
It can be seen that the vector force ${\vec{F}}_i$ can be extracted to three orthogonal vectors $F_{ix},F_{iy}$ and $F_{iy}$. These vectors can also be derived as
$\vec{F_{ix}}=\vec{e_x}\cdot\vec{\ n_i}\cdot F_i$
$F_{iy}=\vec{e_y}\cdot\vec{\ n_i}\cdot F_i$
$F_{iz}=\vec{e_z}\cdot\vec{\ n_i}\cdot F_i$
Equilibrium
In a static situation, the following equilibrium equations can be derived:
$L_{Fx}+\sum_{i=1}^{i=6}{\vec{e_x}\cdot\vec{\ n_i}\cdot F_i}=0$
$L_{Fy}+\sum_{i=1}^{i=6}{\vec{e_y}\cdot\vec{\ n_i}\cdot F_i}=0$
$L_{Fz}+\sum_{i=1}^{i=6}{\vec{e_z}\cdot\vec{\ n_i}\cdot F_i}=0$
$L_{Tx}+\sum_{i=1}^{i=6}{\left[\vec{e_y}\cdot\vec{\ n_i}\cdot-\left(Z_M-Z_{P_i}\right)+\vec{e_z}\cdot\vec{\ n_i}\cdot\left(Y_M-Y_{P_i}\right)\right]\cdot F_i}=0$
$L_{Ty}+\sum_{i=1}^{i=6}{\left[\vec{e_x}\cdot\vec{\ n_i}\cdot\left(Z_M-Z_{P_i}\right)+\vec{e_z}\cdot\vec{\ n_i}\cdot-\left(X_M-X_{P_i}\right)\right]\cdot F_i}=0$
$L_{Tz}+\sum_{i=1}^{i=6}{\left[\vec{e_x}\cdot\vec{\ n_i}\cdot-\left(Y_M-Y_{P_i}\right)+\vec{e_y}\cdot\vec{\ n_i}\cdot\left(X_M-X_{P_i}\right)\right]\cdot F_i}=0$
This can be rewritten as a matrix equation
$ \left[\begin{matrix}L_{Fx}\\L_{Fy}\\L_{Fz}\\L_{Tx}\\L_{Ty}\\L_{Tz}\\\end{matrix}\right]+\left[\begin{matrix}\vec{e_x}\cdot\vec{n_1}&\cdots&\vec{e_x}\cdot\vec{n_6}\\\vec{e_y}\cdot\vec{n_1}&\cdots&\vec{e_y}\cdot\vec{n_6}\\\vec{e_z}\cdot\vec{n_1}&\cdots&\vec{e_z}\cdot\vec{n_6}\\\vec{e_y}\cdot\vec{n_1}\cdot-\Delta Z+\vec{e_z}\cdot\vec{n_1}\cdot\Delta Y&\cdots&\vec{e_y}\cdot\vec{n_6}\cdot-\Delta Z+\vec{e_z}\cdot\vec{n_6}\cdot\Delta Y\\\vec{e_x}\cdot\vec{n_1}\cdot\Delta Z+\vec{e_z}\cdot\vec{n_1}\cdot-\Delta X&\cdots&\vec{e_x}\cdot\vec{n_6}\cdot\Delta Z+\vec{e_z}\cdot\vec{n_6}\cdot-\Delta X\\\vec{e_x}\cdot\vec{n_1}\cdot-\Delta Y+\vec{e_y}\cdot\vec{n_1}\cdot\Delta X&\cdots&\vec{e_x}\cdot\vec{n_6}\cdot-\Delta Y+\vec{e_y}\cdot\vec{n_6}\cdot\Delta X\\\end{matrix}\right]\left[\begin{matrix}F_{1}\\F_{2}\\F_{3}\\F_{4}\\F_{5}\\F_{6}\\\end{matrix}\right]=\vec{0}$
And thus
$\left[\begin{matrix}\begin{matrix}\begin{matrix}L_{Fx}\\L_{Fy}\\\end{matrix}\\L_{Fz}\\\end{matrix}\\\begin{matrix}L_{Tx}\\\begin{matrix}L_{Ty}\\L_{Tz}\\\end{matrix}\\\end{matrix}\\\end{matrix}\right]+T_L\cdot\left[\begin{matrix}\begin{matrix}\begin{matrix}F_1\\F_2\\\end{matrix}\\F_3\\\end{matrix}\\\begin{matrix}F_4\\\begin{matrix}F_5\\F_6\\\end{matrix}\\\end{matrix}\\\end{matrix}\right]=\vec{0}\ \ \ \ \Leftrightarrow\ \ \ \ \ \begin{matrix}\vec{L}=-T_L\cdot\vec{F}\\\\\vec{F}=-{T_L}^{-1}\cdot\vec{L}\\\end{matrix}$
Note that $\vec{L}$ contains both force as well as torque loads, which typically imposes the use of dimensionless values referenced to SI units.