Statically balanced mechanisms are used to compensate for the gravity force of masses. Allowing these mechanisms to move from one configuration to another without the need for large actuation forces. This gravity compensation is done by using springs.
Static equilibrity equation
To have a static equilibrium the sum of all forces has to be zero. A statically balanced mechanism goes one step further by having a static equilibrium in multiple configurations ($0^{\circ}\leq \Theta\leq 360^{\circ}$ in this case).
By tuning $m,l,c,a$ and $r$ so that $mgl=car$, $U_t$ will be constant and independent of $\theta$. This means that the mechanism will be statically balanced at every value of $\theta$. During variation of $\theta$, no force has to be applied (except for friction forces) to move the mechanism.
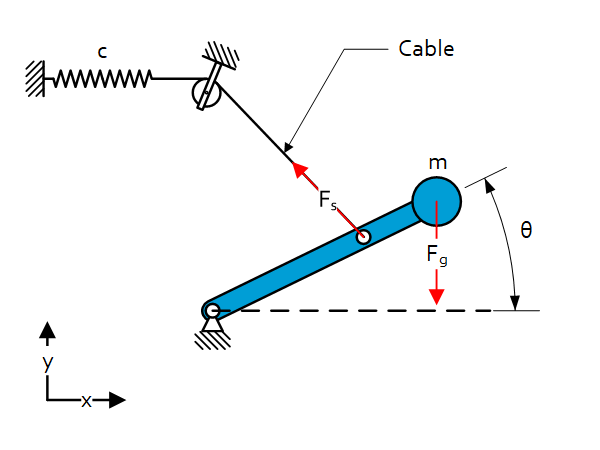
An example of a mechanism that is statically balanced using a cable attached to a spring.
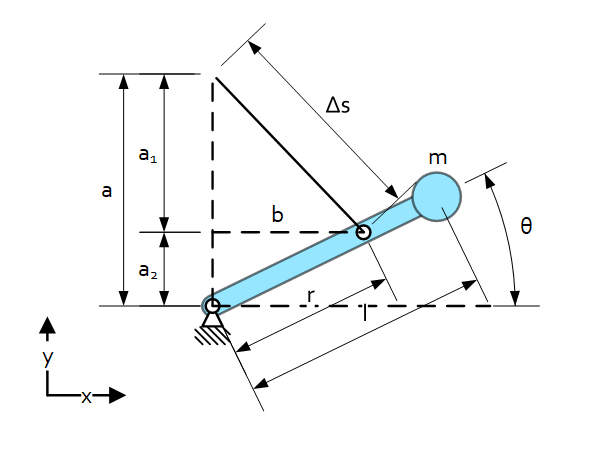
The geometry of the mechanism used to calculate the elongation of the spring $\Delta s$.
Tech Support
Please submit a message and we will come back to you on short notice.
Precision Point sheet download
Please fill in your details to receive the requested Precision Point sheet.
We use cookies to ensure to give you the best experience on our website. If you continue to use this site we will assume that you are okay with it.