Introduction
Evaluating sensor specifications can be confusing. Part of this is due to the ambiguous parameter definition which varies between mechanical and electrical engineers and from manufacturer to manufacturer. Below the unambiguous JPE-definitions. NOTE: Temperature scale can either be in Kelvin or in degree Celsius. Only Kelvin is used in this sheet for convenience.
Read-out electronics
Temperature sensors and read-out electronics are typically sold separately, but for the designer only the combined performance is of interest. Therefore, the following parameters are defined for the combination of sensor and read-out electronics.
Relative or absolute (s)
An absolute sensor measures with respect to the absolute zero (0 [K]) while a relative sensor measures with respect to a reference temperature (e.g. ambient). Examples: Pt100 is an absolute sensor, a thermocouple a relative sensor.
Contactless (s)
A sensor is contactless if it does not require a mechanical connection or contact (sliding, rolling) with the target to measure the temperature, e.g. by measuring the emitted radiation.
Vacuum compatibility (s)
A sensor is vacuum compatible if the sensor can be continuously operated within specification in (high) vacuum and all the parts of the sensors which are inside the vacuum chamber (e.g. head, cable, connector) must meet the outgassing requirement of the specified vacuum level, e.g. (Ultra) High Vacuum.
Range (s,e)
The range of temperature sensors is defined by a lower and an upper limit $T_{min}$ and $T_{max}$ [K]. NOTE: The physical range of a sensor is not necessarily the same as the range of the read-out electronics. Therefore, both should be specified.
Resolution (e)
Smallest detectable/discernible temperature increment [K]. NOTE: Typically the resolution is equal to the noise level (noise limited), but manufacturers often quote the resolution of an internal digitizer which is too optimistic! NOTE2: Resolution might vary over the range and this is not always clearly specified in the datasheet. NOTE3: higher/better resolution = smaller increments, lower/worse resolution = larger increments.
Accuracy (s,e)
Maximal deviation of the measured temperature with respect to the definition of the temperature scale [K]. NOTE: manufacturers often specify accuracy as percentage of the range.
Absolute accuracy (s,e): Maximal deviation of the measured temperature with respect to the absolute temperature (Kelvin scale) [K]. NOTE: Even a relative sensor can be accurate.
Gain (s,e)
Conversion gain from temperature to sensor output (e.g. [Ω/K] for a Pt100 or [V/K] for a thermocouple) and from temperature to output signal of read-out electronics (e.g. [V/K] or [A/K]). The gain can be a constant or dependent on temperature. The inverse gain, including the gain of the read-out electronics, is used to calculate the measured temperature from the sensor signal.
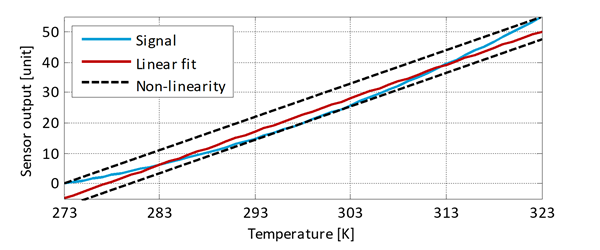
Linearity (s,e)
Maximum deviation of the sensor value from a first order polynomial fit expressed as a percentage of the total range, see figure below. NOTE: Resistance Temperature Detectors (RTD e.g. Pt100) are typically linear to a high degree while thermocouples and thermistors (made from ceramic or polymer) are not. NOTE 2: microprocessor controlled read-out electronics can compensate for non-linearity using either a pre-programmed or a user-supplied calibration curve.
Reproducibility (e)
Ideally a sensor always gives the same output when it is at the same temperature. If this is not the case, the reproducibility is equal to the maximal deviation from the mean value [K].
Stability (s,e)
Deviation of the sensor output while the temperature is invariant over a long term (> 10 seconds). For instance due to drift of the sensor properties (e.g. resistance) or read-out gain.
Time constant / response time (s,e)
Characterizes the dynamics of the temperature sensor by its response to a step function, i.e. the response of the sensor to a sudden change in temperature. The response of a first order system to a unit step is $T\left(t\right)/T_0=1-e^\frac{-t}{\tau}$ with $\tau$ the time constant and $T\left(t\right)/T_0\left(\tau\right)=0.63$, $T\left(t\right)/T_0\left(3\tau\right)=0.95$, $T\left(t\right)/T_0\left(5\tau\right)=0.99$. NOTE: For temperature sensors a first order approach is usually sufficient. NOTE2: the sensor time constant should be considerably lower than the time constant of the target. NOTE3: The bandwidth of the sensor is given by $f_{bw}=\frac{1}{\left(2\pi\cdot\tau\right)}$ [Hz]; The bandwidth of the read-out electronics is generally limited by filtering.
Noise level (e)
The noise level is defined as three times the standard deviation (3σ) of the sensor signal ‘at rest’.
Quasi-static noise: frequency range $f_{bw\ min}$ to ~1 Hz
Dynamic noise: noise in the frequency range $f_{bw\ min}$ to$f_{bw\ max}$.
NOTE: The noise is mainly generated in the read-out electronics. Still, a higher sensor gain requires less amplification in the electronics and thus typically results in a lower noise level. For instance, a Pt100 performance poorly at cryo because of its low resistance at low temperatures; Use a Pt1000 instead.
Cross-talk (s,e)
Cross-talk can occur between different channels in a multi-sensor setup or originate from interference of an external source (EMI). Cross-talk depends strongly in application specific parameters, e.g. distance between sensors or sensor and actuator, cable routing, and thus cannot be quantified by one generic value. NOTE: As temperature measurements are usually done at low frequencies (< 100 Hz), cross-talk can largely be minimized by filtering.